EEERover - Helionix
Project information
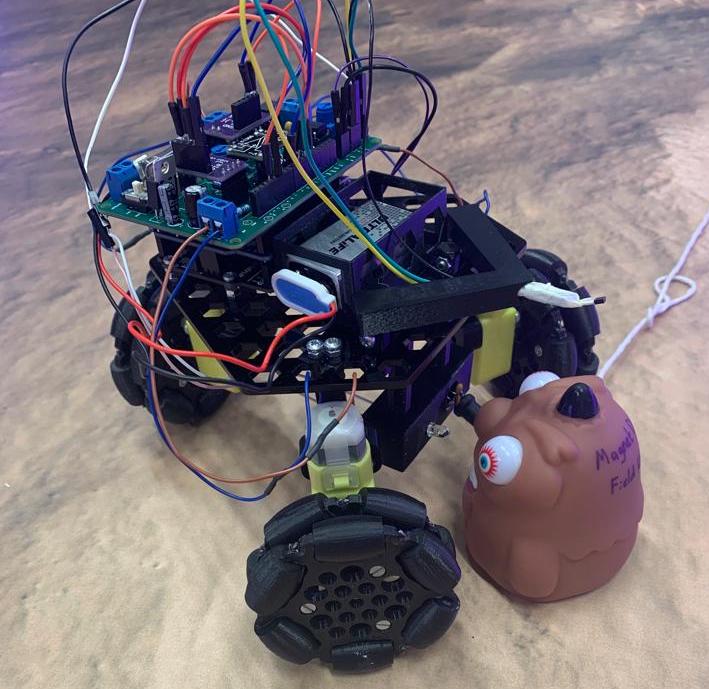
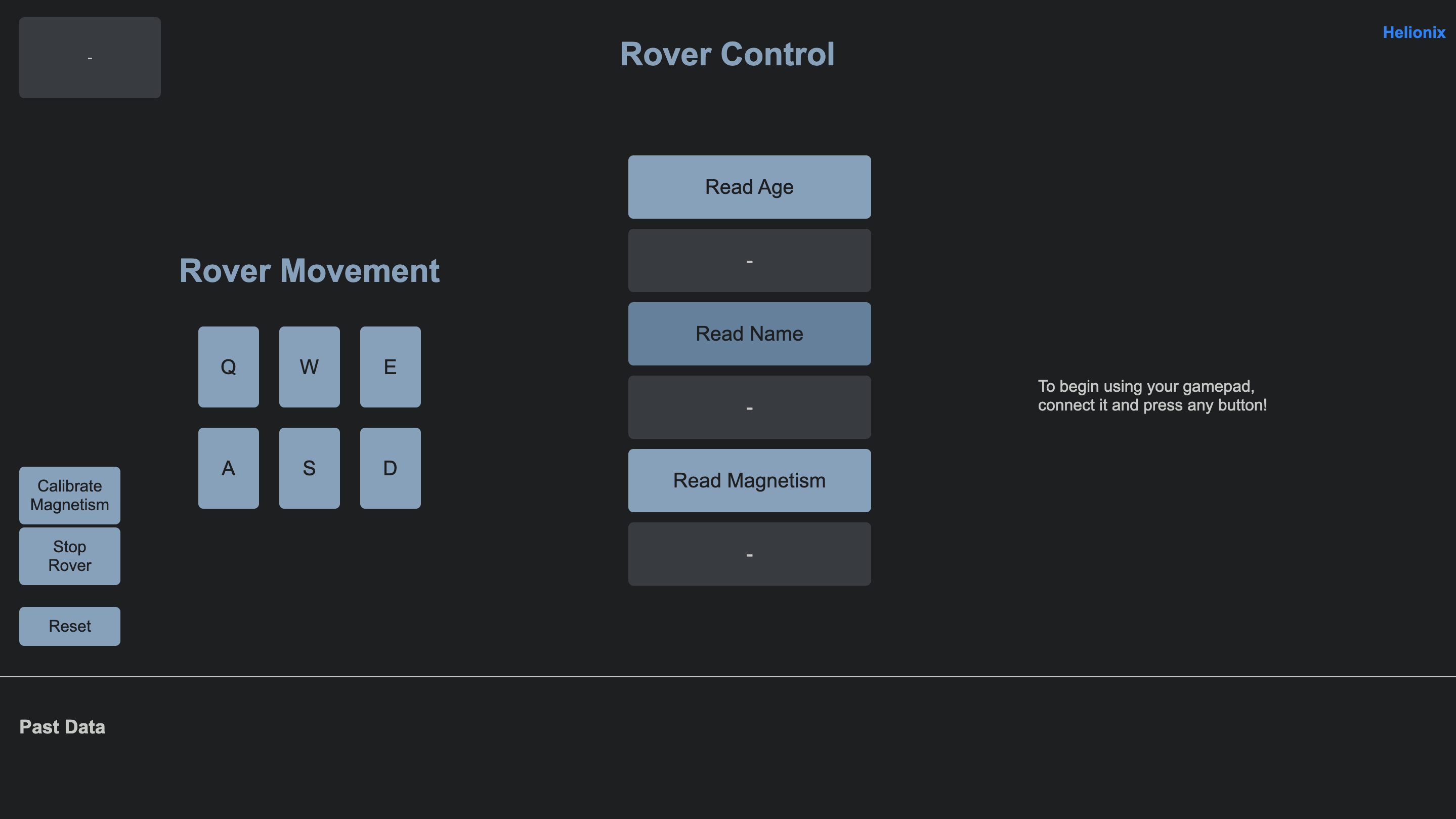
Created a rover over 5 weeks in a team of 6, our team achieving 1st of 33 teams in the demonstration of our rovers. The rover is capable of detecting Magnetic, Infra Red and Radio signals, then send them over TCP to a computer which decodes them and is running a webpage to display the decoded information to the user. Rover maneuvers through the use of 3 omni-wheels, all structural parts were designed in Fusion360 and 3D printed.
My role was in producing the webpage to display rover data and communicate with the rover, helping with decoding of received signals as well as designing and printing of the chassis and wheels.