D-PALI 3D — dexterous gripper with RL control
Project information
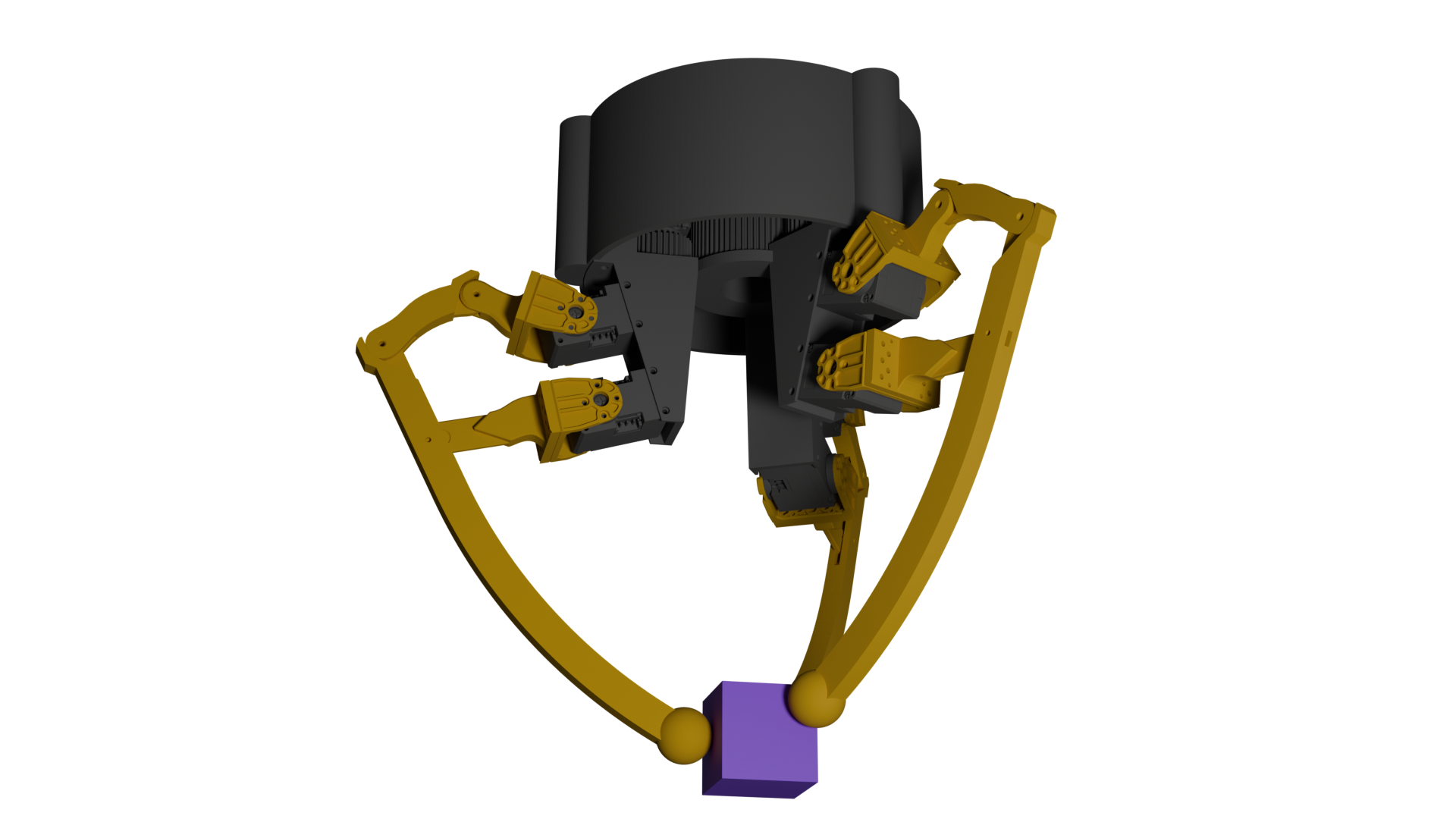
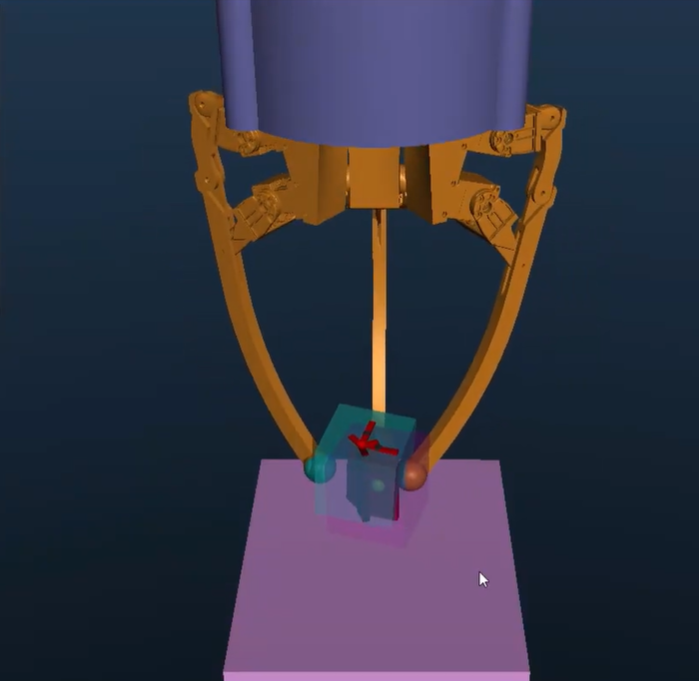
10-week Imperial College project extending the Manipulation and Touch Lab's D-PALI gripper into full 3D manipulation. We redesigned the linkage and rotating finger bases to widen the workspace while keeping the low-actuator philosophy, then built MuJoCo simulations to validate kinematics before physical tests.
Trained TD3 policies (Gymnasium + Stable Baselines3) to move and orient a cube, using reward shaping (approach, manipulation, orientation, contact) and OU noise. Hyperparameter sweeps covered LR decay, batch size, gamma, and network width. Results show stable planar orientation/positioning with clear future work on vectorised environments and imitation learning.